Mitä puikkoja sulla oli mielessä?2x AA-ohjusta
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
UAV / UCAV / LAR (robotit) Uutiset ja jutut
- Viestiketjun aloittaja Raveni
- Aloitus PVM
Vaikka Advanced Precision Kill Weapon System IIMitä puikkoja sulla oli mielessä?

Air Force Tests Laser Guided Rockets In The Air-To-Air Role To Shoot Down Cruise Missiles
A recent test was a proof of concept for using these air-to-ground weapons to knock down cruise missiles, but they could also take out small drones.
 www.thedrive.com
www.thedrive.com
Tai Aim-9X:
https://www.thedrive.com/the-war-zo...-shoot-down-mock-cruise-missiles-in-huge-test
Mitä halvempi ja kevyempi, sitä parempi.
")
A U.S. Air Force MQ-9 Reaper assigned to the 556th Test and Evaluation Squadron successfully employed a live air-to-air AIM-9X Block 2 missile against a target BQM-167 drone simulating a cruise missile. The crew received off-board cueing information, found and tracked the target, then maneuvered to validly employ the AIM-9X against the surrogate cruise missile.Eli pitkiä puikkoja. Aim-9x on yli kolme metriä pitkä. Ei mene heittämällä tutkamodulin kanssa koneeseen. UCAV on se mitä haet. Markkinoilla niitä ei ole ja se jenkkien drone meni tankkaustoimintaan.

ABMS Onramp 2 sees second MQ-9 AIM-9X shot and other CMD tactics development
From employing an AIM-9X from an MQ-9 to improving AGR-20 cruise missile defense tactics from the F-16, units across the 53d Wing played a critical role in the Advanced Battle Management System Onramp
www.creech.af.mil
fulcrum
Greatest Leader
Ei. Reaperin suorituskyky vastaa jotain potkuriturbiinikonetta a'la Redigo. Siinä ei myöskään ole ilmasta-ilmaan tutkaa. Luulen että mahdollinen ilma-aseistus olisi tarkoitettu lähinnä toisia droneja vastaan.Ovat vain älyttömän kalliita. Jenkit voisivat sijoittaa muutaman tuollaisen (tektissä on typo, MQ-9 ne on) Suomeen ja kerätä datat molemmille, nyt kun ollaan jo Natossakin heti kun vain ottavat.

Spain buys two MQ-9 Block 5 Reaper drones
Spain plans to purchase two General Atomics Aeronautical Systems MQ-9 Block 5 Reapers for $34 million via the US foreign military sales process.www.flightglobal.com
Pärjäisiköhän tuollaisella yksinään ryssän hävittäjää vastaan? Huomioiden niiden pilottien vähäiset lentotunnit...
Mikä voisi olla mahdollista on käyttää tuollaista eräänlaisena lentävänä it-ohjuslavettina. Kaksi AMRAAMia siipien alla ja maalinosoitus tapahtuu jollain ulkoisella tutkalla datalinkkien kautta.
Joku Bayraktar Akinci saattaisi olla sopiva. Niitä muutamia rajavartiolaitokselle ja sitten sota-aikana voisivat toimia myös risteilyohjus/drone/helikopteri puolustuksessa.Eli pitkiä puikkoja. Aim-9x on yli kolme metriä pitkä. Ei mene heittämällä tutkamodulin kanssa koneeseen. UCAV on se mitä haet. Markkinoilla niitä ei ole ja se jenkkien drone meni tankkaustoimintaan.
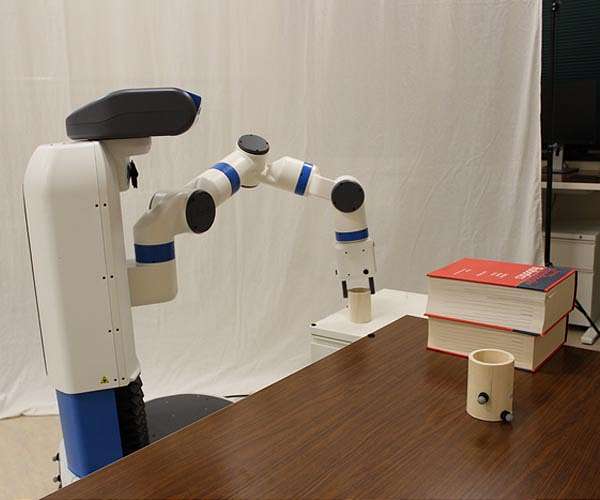
Just like us, robots can't see through walls. Sometimes they need a little help to get where they're going. Engineers at Rice University have developed a method that allows humans to help robots "see" their environments and carry out tasks. The strategy called Bayesian Learning IN the Dark - BLIND, for short - is a novel solution to the long-standing problem of motion planning for robots that work in environments where not everything is clearly visible all the time.
The peer-reviewed study led by computer scientists Lydia Kavraki and Vaibhav Unhelkar and co-lead authors Carlos Quintero-Pena and Constantinos Chamzas of Rice's George R. Brown School of Engineering was presented at the Institute of Electrical and Electronics Engineers' International Conference on Robotics and Automation in late May.
The algorithm developed primarily by Quintero-Pena and Chamzas, both graduate students working with Kavraki, keeps a human in the loop to "augment robot perception and, importantly, prevent the execution of unsafe motion," according to the study.
Humans in the loop help robots find their way
Houston TX (SPX) Jun 29, 2022 - Just like us, robots can't see through walls. Sometimes they need a little help to get where they're going. Engineers at Rice University have developed a method that allows humans to help robots se
www.spacedaily.com
"We use a specific way of feedback called critique, basically a binary form of feedback where the human is given labels on pieces of the trajectory," he said.
These labels appear as connected green dots that represent possible paths. As BLIND steps from dot to dot, the human approves or rejects each movement to refine the path, avoiding obstacles as efficiently as possible.
"It's an easy interface for people to use, because we can say, 'I like this' or 'I don't like that,' and the robot uses this information to plan," Chamzas said. Once rewarded with an approved set of movements, the robot can carry out its task, he said.
"One of the most important things here is that human preferences are hard to describe with a mathematical formula," Quintero-Pena said. "Our work simplifies human-robot relationships by incorporating human preferences. That's how I think applications will get the most benefit from this work."
"This work wonderfully exemplifies how a little, but targeted, human intervention can significantly enhance the capabilities of robots to execute complex tasks in environments where some parts are completely unknown to the robot but known to the human," said Kavraki, a robotics pioneer whose resume includes advanced programming for NASA's humanoid Robonaut aboard the International Space Station.
"It shows how methods for human-robot interaction, the topic of research of my colleague Professor Unhelkar, and automated planning pioneered for years at my laboratory can blend to deliver reliable solutions that also respect human preferences."
rty19
Greatest Leader
Puolustusvoimat saa käyttöönsä uudet tiedustelulennokit ensi vuonna – myös aseistetut taisteludroonit voivat tulla harkintaan
Puolustusvoimilla on meneillään useita selvityksiä lennokeista, joista yksi on amerikkalainen Reaper-taisteludrooni.
 yle.fi
yle.fi
Vääpeli
Greatest Leader
Mitä ne Ilmavoimia tähän sotkee, lennokki toimintahan on ollut MAAV alla. Ei kai tässä ole käynnissä joku pissimiskilpailu, että kelle ne uudet isot lennokit tulee? Ja kun ILMAV on jo AG suorituskyky, niin katsovat ettei aseistettuja lennokkeja tarvita?
Puolustusvoimat saa käyttöönsä uudet tiedustelulennokit ensi vuonna – myös aseistetut taisteludroonit voivat tulla harkintaan
Puolustusvoimilla on meneillään useita selvityksiä lennokeista, joista yksi on amerikkalainen Reaper-taisteludrooni.
Ja ehdottomasti noi lennokit pitäs olla MAAV alla, että tiedustelutieto tulee nopeammin käyttöön MAAV joukoille.
miheikki
Greatest Leader

Tokyo police using a drone to capture illegal flying drones - Awesome
23 points • 6 comments
rty19
Greatest Leader
Jutussa mainittiin että F-35:iin on tulossa mahdollisuus toimia yhteistoiminnassa lennokkien kanssa. Ehkä siksi on parempi että ilmavoimat hoitaa ne suuret ja kalliit aseistetut dronet jossain vaiheessa sen jälkeen kun F-35:t on saatu Suomeen.Mitä ne Ilmavoimia tähän sotkee, lennokki toimintahan on ollut MAAV alla. Ei kai tässä ole käynnissä joku pissimiskilpailu, että kelle ne uudet isot lennokit tulee? Ja kun ILMAV on jo AG suorituskyky, niin katsovat ettei aseistettuja lennokkeja tarvita?
Ja ehdottomasti noi lennokit pitäs olla MAAV alla, että tiedustelutieto tulee nopeammin käyttöön MAAV joukoille.
Mikfin70
Ylipäällikkö
Parempi, että tuo isompi materiaali menee opereratiiviselle puolustushaaralle ja on jo normaalioloissa operatiivisesta käytössä itärajan ja merialueiden valvonnassa.Mitä ne Ilmavoimia tähän sotkee, lennokki toimintahan on ollut MAAV alla. Ei kai tässä ole käynnissä joku pissimiskilpailu, että kelle ne uudet isot lennokit tulee? Ja kun ILMAV on jo AG suorituskyky, niin katsovat ettei aseistettuja lennokkeja tarvita?
Ja ehdottomasti noi lennokit pitäs olla MAAV alla, että tiedustelutieto tulee nopeammin käyttöön MAAV joukoille.

BAE RTD
The autonomous RTD (Robotic Technology Demonstrator) meets the Army’s needs for an RCV medium solution. Multi-mission capable, the RTD has a commercially-proven hybrid electric drive and can be equipped with various advanced payloads such as electronic warfare sensors, various gun systems, anti-tank guided missiles and 2.75” rockets with BAE Systems’ APKWS® (Advanced Precision Kill Weapon System) laser-guidance kit. The vehicle also can be fitted with loitering munitions to defeat armored and unmanned aerial threats.
“Over the past year, we’ve partnered with leading technology companies to build an autonomous vehicle that will exceed the Army’s RCV medium requirements,” said Helen Park, Future Tech Works director at BAE Systems. “This successful demonstration proves that our unmanned vehicle can be integrated and updated with cutting-edge technology, payloads, and weapon systems to support multiple mission sets and deliver advanced capability in a multi-domain operational environment.”
Ground-launched APKWS rockets provide mounted units with a unique capability to engage ground targets and unmanned aerial vehicles at ranges up to six kilometers. This provides warfighters with a cost-effective solution for precision strikes with greater range than small arms fire and without the need for air support.
BAE Systems demonstrates the firing of APKWS laser-guided rocket from tracked robot | weapons defence industry military technology UK | analysis focus army defence military industry army
BAE Systems’ Robotic Technology Demonstrator (RTD) successfully fired laser-guided rockets mounted on its Technology Demonstrator RTD
In order to better understand how people will interact with mobile robots in the wild, we need to take them out of the lab and deploy them in the real world. But this isn’t easy to do.
Roboticists tend to develop robots under the assumption that they’ll know exactly where their robots are at any given time—clearly that’s an important capability if the robot’s job is to usefully move between specific locations. But that ability to localize generally requires the robot to have powerful sensors and a map of its environment. There are ways to wriggle out of some of these requirements: If you don’t have a map, there are methods that build a map and localize at the same time, and if you don’t have a good range sensor, visual navigation methods use just a regular RGB camera, which most robots would have anyway. Unfortunately, these alternatives to traditional localization-based navigation are either computationally expensive, not very robust, or both.
We ran into this problem when we wanted to deploy our Kuri mobile social robot in the halls of our building for a user study. Kuri’s lidar sensor can’t see far enough to identify its location on a map, and its onboard computer is too weak for visual navigation. After some thought, we realized that for the purposes of our deployment, we didn’t actually need Kuri to know exactly where it was most of the time. We did need Kuri to return to its charger when it got low on battery, but this would be infrequent enough that a person could help with that if necessary. We decided that perhaps we could achieve what we wanted by just letting Kuri abandon exact localization, and wander.

Wandering Robots in the Wild
In order to better understand how people will interact with mobile robots in the wild, we need to take them out of the lab and deploy them in the real world. But this isn’t easy to do.
 spectrum.ieee.org
spectrum.ieee.org
siviili artikkeli mutta tärkeä omaksua myös mil tuotteissa

World’s Biggest Foam RC Plane Takes To The Skies, But Only Barely!
What do you do when you have a whole warehouse sized facility and an industrial sized CNC foam cutter? Clearly, the only choice is to build giant RC aircraft, and that’s exactly what the folk…
Erittäin kevyt lennokki proto. Mielenkiintoinen proof-of-concept, styroksista.
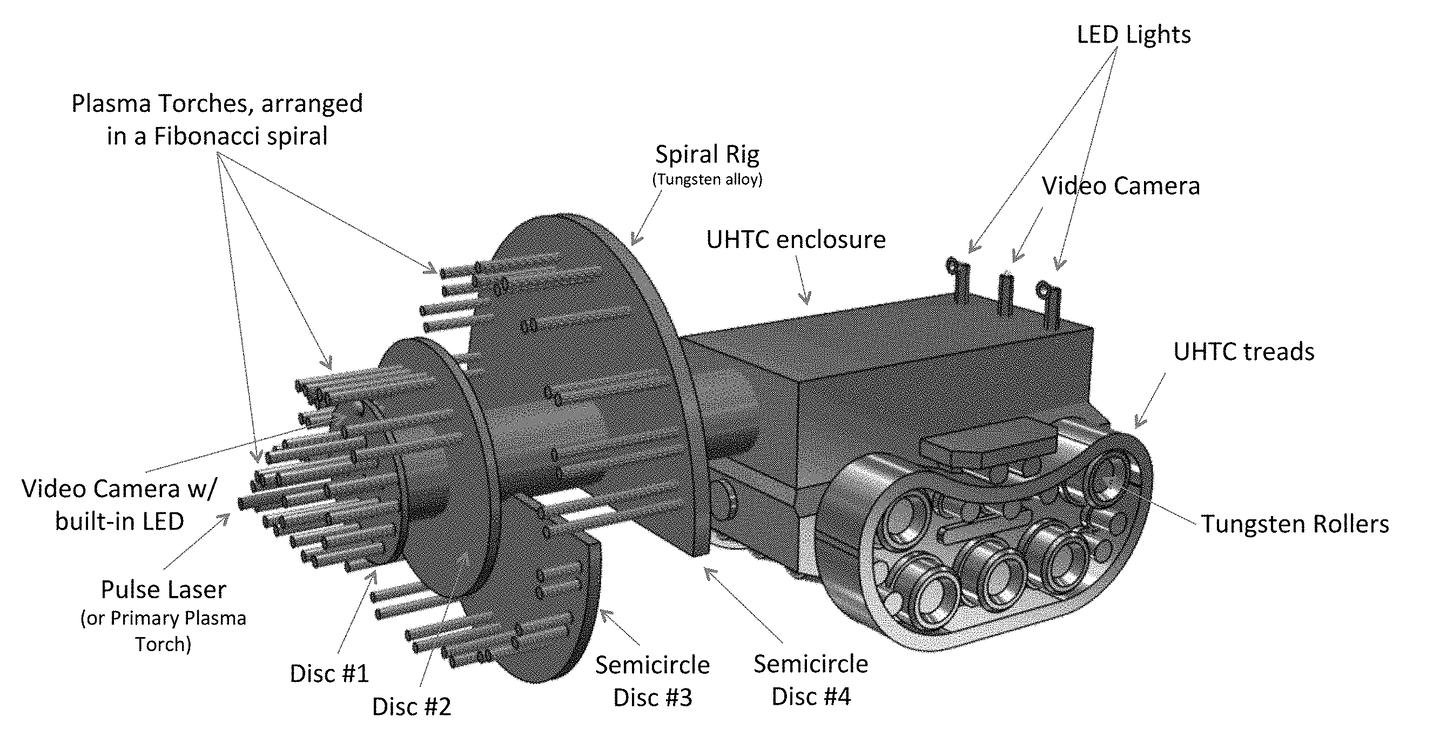
Earthgrid doesn't seem to be as far along as Petra – indeed, it's operating on pre-seed funding at the moment. But its intellectual property takes a spallation boring robot like Petra's to the next level, placing multiple 27,000 °C (48,600 °F) plasma torches onto large discs held out in front of a "Rapid Burrowing Robot (RBR)." The torches are arranged in a Fibonacci spiral, starting from the center and widening out until they cover the full diameter of the bore.
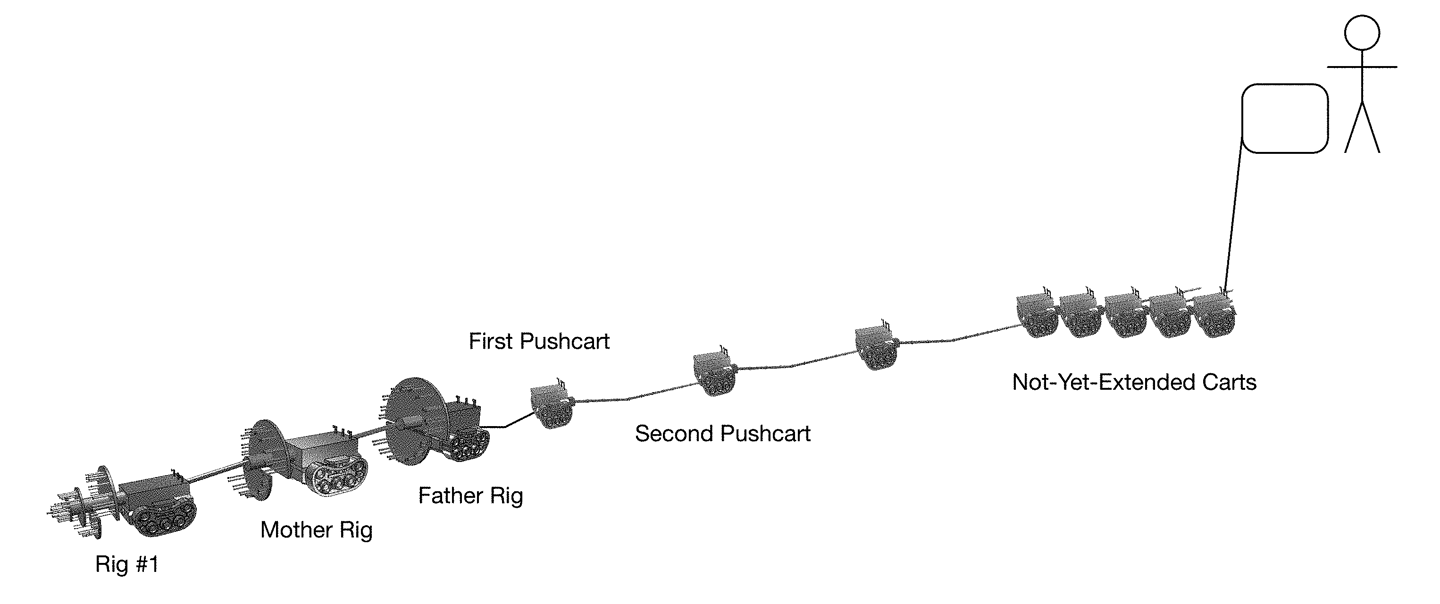
Where Petra's thermal drilling robot moves its head around to widen its hole, the RBR will fire on all torches at once, and rotate the torch-bearing discs to ensure full coverage, blasting the rock backward and collecting it into small pushcarts, each connected along the cable supplying electricity to the drill rig.
That cable will need to handle some serious juice. In estimations submitted as part of a patent, Earthgrid founder Troy Helming describes a potential embodiment of the concept using 72 plasma torches to drill a 1-meter (3.3-ft) bore. In its low-power state, with each torch consuming 500 kW, Helming estimates a total power draw of 40 megawatts. If you need to get cracking, the high-power state would draw as much as a constant 120 MW.

Earthgrid aims to re-wire the USA using super-cheap tunnel tech
Bay Area startup Earthgrid says it's developing a plasma boring robot that can dig underground tunnels 100x faster and up to 98% cheaper than existing tech, and it plans to use it to start re-wiring America's energy, internet and utilities grids.
 newatlas.com
newatlas.com
The total power draw in a "stage 3" system like this could get as high as 1.38 gigawatts – but that's by no means the limit; upgrading the torches to higher power units would get the job done considerably faster, if an even more epic amount of electricity becomes available.
In a high-speed configuration, Earthgrid claims it can tunnel up to 1 km (0.62 miles) per day, which it says is up to 100 times faster than existing borers. For reference, Elon Musk's Boring Company has designed its porpoising Prufrock mechanical tunneling machine to do 0.24 km (0.15 miles) a day – although it says its medium-term goal is to get Prufrock up closer to 1.13 km (0.7 miles) per day. Mind you, on its debut, drilling a 3.2-km (2-mile) tunnel under the Las Vegas Convention Center, it managed just 15 m (49 ft) per day.

Skynet Presursor? 9mm AK Equipped Robot From Alexander Atamanov
TFB Recently came across a YouTube video by one Alexander Atamanov featuring what he calls a "Patrol Dog Robot" - a 9mm AK Equipped robot dog.
 www.thefirearmblog.com
www.thefirearmblog.com