Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
UAV / UCAV / LAR (robotit) Uutiset ja jutut
- Viestiketjun aloittaja Raveni
- Aloitus PVM
https://spectrum.ieee.org/tech-talk...racing-drones-have-need-for-ai-speed-trainingDrone racing’s ultimate vision of quadcopters weaving nimbly through obstacle courses has attracted far less excitement and investment than self-driving cars aimed at reshaping ground transportation. But the U.S. military and defense industry are betting on autonomous drone racing as the next frontier for developing AI so that it can handle high-speed navigation within tight spaces without human intervention.
The autonomous drone challenge requires split-second decision-making with six degrees of freedom instead of a car’s mere two degrees of road freedom. One research team developing the AI necessary for controlling autonomous racing drones is the Robotics and Perception Group at the University of Zurich in Switzerland. In late May, the Swiss researchers were among nine teams revealed to be competing in the two-year AlphaPilot open innovation challenge sponsored by U.S. aerospace company Lockheed Martin. The winning team will walk away with up to $2.25 million for beating other autonomous racing drones and a professional human drone pilot in head-to-head competitions.
“I think it is important to first point out that having an autonomous drone to finish a racing track at high speeds or even beating a human pilot does not imply that we can have autonomous drones [capable of] navigating in real-world, complex, unstructured, unknown environments such as disaster zones, collapsed buildings, caves, tunnels or narrow pipes, forests, military scenarios, and so on,” says Davide Scaramuzza, a professor of robotics and perception at the University of Zurich and ETH Zurich. “However, the robust and computationally efficient state estimation algorithms, control, and planning algorithms developed for autonomous drone racing would represent a starting point.”
https://hackaday.com/2019/06/06/designing-a-drone-to-fire-from-a-grenade-launcher/You might think that tiny autonomous drones that can be fired out of a standard 40 mm grenade launcher for rapid deployment would be the kind of thing the military would love to get their hands on. Which is true, of course, and a number of companies are working on the idea for police and military applications. But [Glytch] thinks the technology could also be used for search and rescue operations, so he’s working on creating a version for us civilians.
During his presentation “3D Printing Canister-Launchable Drones for City-Scale Wardriving” at the 2019 CircleCityCon, [Glytch] gave an overview of his progress towards creating a small fixed-wing Unmanned Aerial Vehicle (UAV) that can be built even by those of us who don’t have the budgets of a three letter government agency. He’s not at the point where he can do a test launch just yet, but the design is coming along nicely, and we’re extremely interested in seeing where it goes from here.
The only way you’re fitting a winged aircraft into the bore of a 40 mm launcher is by folding it up, and so far, that’s where [Glytch] has directed most of his efforts. The wings of his UAV will use a rigid leading edge that folds flat until deployment. When in flight mode, ripstop nylon attached between the body of the drone and the leading edge will be pulled taught to form the actual wing surface; think of it sort of like a bat’s wing. A similar trick will be used for the two control surfaces at the rear of the craft.
Internally, the UAV is using all off-the-shelf components which [Glytch] hopes will keep it cheap enough that they could eventually be mass produced. As he explained in a recent YouTube video, the motor, speed controller, receiver, and flight controller, are all the sort of thing you’d expect to find in a small RC quadcopter. To make it easier to manage the UAV in the field, the batteries and payload will be housed in a detachable nose cone; allowing the user to rapidly configure the hardware for different missions.
Right now, [Glytch] says the biggest obstacle keeping his drone out of the air is finding a foldable propeller with the specific characteristics he requires. Unable to find anything commercially available, he’s currently looking into designing it himself and having it 3D printed on an SLA machine. He also needs to design a sabot to hold the drone as it travels through the barrel of the launcher. Incidentally, he’s currently testing his design with an Airsoft grenade launcher, as he doesn’t want to wade through the paperwork involved in getting the real deal.
[Glytch] is no stranger to the world of high-tech UAVs. The “Watch Dog” inspired hacking drone he created last year was a huge hit, and he’s recently been working on a HD video and telemetry link over WiFi with the Raspberry Pi Zero for his flying creations.


POTD: .50 Cal Multi-Utility Tactical Transport Vehicle -
Today's photo of the day is a blast from the recent past it features Marines of Kilo Company, 3rd Battalion, 5th Marines Regiment, with a Weaponized Multi-Utility Tactical Transport vehicle
 www.thefirearmblog.com
www.thefirearmblog.com
Einomies1
Respected Leader
Ilmetty "The beast Of Kandahar" kopioituna ja suurennettuna...


Slothbot Takes a Leisurely Approach to Environmental Monitoring
For environmental monitoring, precision agriculture, infrastructure maintenance and certain security applications, slow and energy efficient can be better than fast and always needing a recharge. That’s where “SlothBot” comes in.
Slothbotti voi olla hyvä jos se pystyy väitteiden mukaan tuomaan sensorikentän metsän latvustoihin ja toimimaan kuukausia siellä.
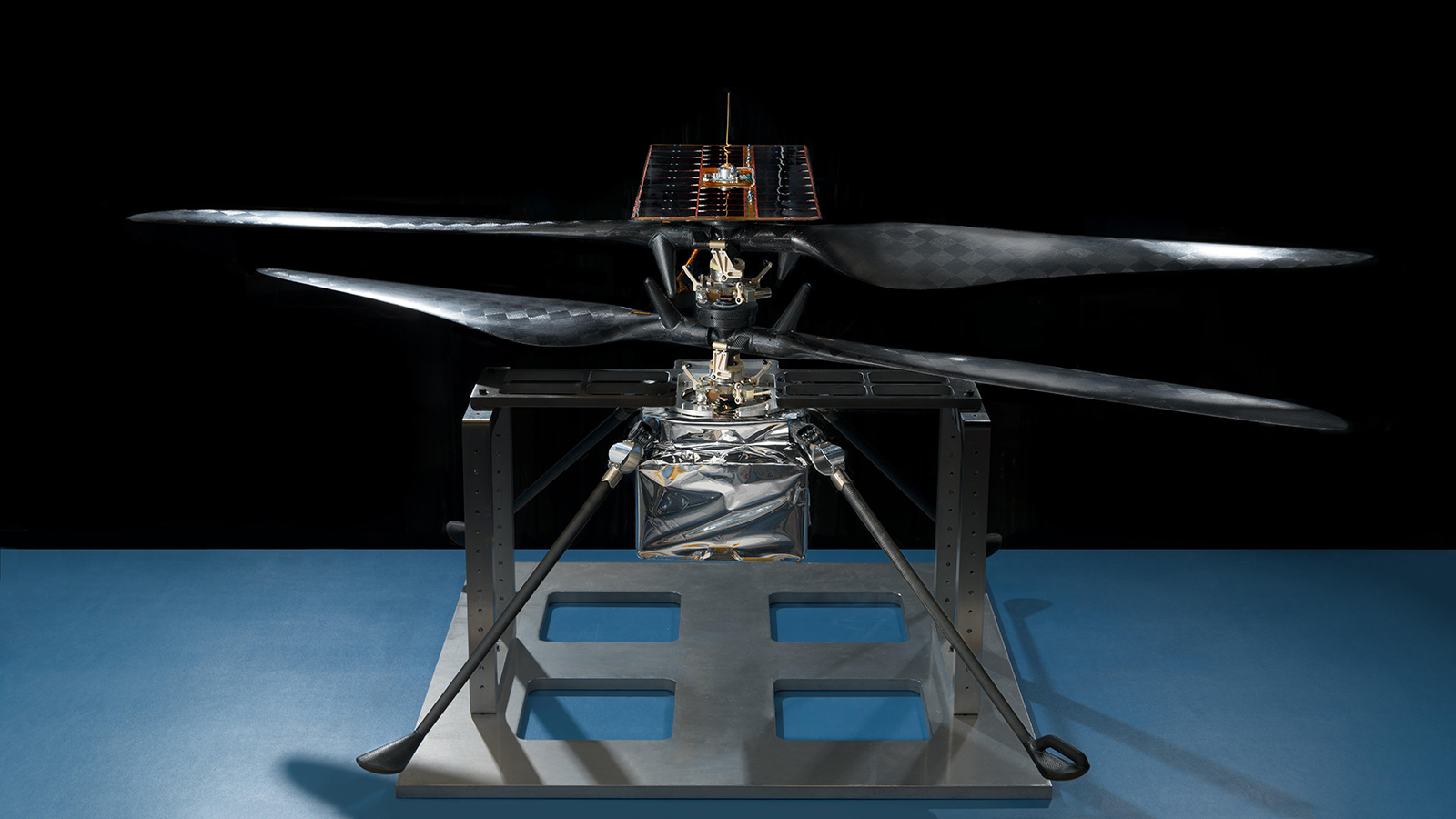
NASA's Mars Helicopter Testing Enters Final Phase
The Mars Helicopter - a small, autonomous aircraft that will demonstrate the viability of heavier-than-air vehicles on Mars - has passed several key tests with flying colors.
Viimeksi muokattu:
Puolustusvoimat hankkii 150 drone-lennokkia
TIVI10.6.201914:59|päivitetty10.6.201914:

Miehittämättömät lennokit eli dronet erinomaisesti esimerkiksi tavaroiden kuljettamiseen tai ilmakuvaamiseen. Suomen puolustusvoimat on päättänyt, että myös sillä on tulevaisuudessa käyttöä droneille.
https://www.tivi.fi/uutiset/puolustusvoimat-hankkii-150-drone-lennokkia/
TIVI10.6.201914:59|päivitetty10.6.201914:
Miehittämättömät lennokit eli dronet erinomaisesti esimerkiksi tavaroiden kuljettamiseen tai ilmakuvaamiseen. Suomen puolustusvoimat on päättänyt, että myös sillä on tulevaisuudessa käyttöä droneille.
https://www.tivi.fi/uutiset/puolustusvoimat-hankkii-150-drone-lennokkia/
Viimeksi muokattu:
Mili
Eversti
^Hankinnat tästä firmasta todennäköisesti: www.verticalhobby.com
https://www.verticalhobby.com/kauppa/ammatti-teollisuus-c-144_240.html
Hienoja pelejä ja mielenkiintoisia lisävarusteita, mm. 4k ja lämpökameraa.
https://www.verticalhobby.com/kaupp...alle-30x-optinen-zoom-ja-sammutin-p-6931.html
Sammutusdrone 45min toiminta-ajalla, 5km toimintasäteellä ja 15kg kuormalla. Mitä muuta kuormaksi saisi kuin sammuttimen?
Siihen saa varusteeksi megafonin, voi kutsua naapurista poikia hakemaan voita leivälle.
"Walkera ZHUN on palokunnan käyttöön suunniteltu raskas drone. Se pystyy sammuttamaan ulkoiset tulipalot 1.2 - 4.8m pitkällä suuttimella, jolla sammutusaine voidaan paineella suihkuttaa suoraan paloon. Zhun:ssa on myös laukaisulaite palosammuttimille, jolla voidaan laukaista palosammutin palavan tilan sisälle (esim. ikkunan läpi). Sen kantama on jopa 40 m ja tähtäykseen on oma kiikaritähtäinkamera, joka toimii myös pimeällä. Palosammutin laukeaa sisätiloissa ja sammuttaa noin 9m3 kokoisen palon. Kopteri on varustettu LiDAR tutkalla ja esteenväistöantureilla, joilla se voi navigoida ja mitata laukaisuetäisyyden tarkasti haastavassa paloympäristössä. Palosammutin on nopeasti ladattavissa, jolloin useita palopesäkkeitä voidaan sammuttaa nopeasti. Lisäksi kopterissa on normaali ruiskusammutus, jolla voi sammuttaa paloja ulkopuolelta. Lentoaika on 44 000mAh 12s LiHV akulla jopa 45 minuuttia.
Kopteri on varustettu kahdeksalla moottorilla ja se voi toimia vaikka osa moottoreista rikkoontuisi. Kopteri on IP65 vesi- ja pölysuojattu, joten se voi toimia kaikissa sääolosuhteissa. Kopteri on testattu yli 5km korkeudessa, pakkasessa ja lumisateessa. Ensimmäinen drone, jolla on palolaitoksen hyväksyntä (Kiina).
Taittuvarunkoisena se mahtuu pieneen tilaan (esim. henkilöautoon) ja on helppo tuoda palopaikalle ja saatavissa nopeasti lentokuntoon. Sen kantokyky on jopa 15kg ja voi kantaa laajaa varustevalikoimaa tehtävän mukaan. Valikoimiin kuuluu mm. 30 x optinen zoom 4K kamera (vakiona), LiDAR tutka (vakiona), lämpökamera, yökamera, megafoni. Ohjauslaitteen kantama on jopa 10 km."
https://www.verticalhobby.com/kauppa/ammatti-teollisuus-c-144_240.html
Hienoja pelejä ja mielenkiintoisia lisävarusteita, mm. 4k ja lämpökameraa.
https://www.verticalhobby.com/kaupp...alle-30x-optinen-zoom-ja-sammutin-p-6931.html
Sammutusdrone 45min toiminta-ajalla, 5km toimintasäteellä ja 15kg kuormalla. Mitä muuta kuormaksi saisi kuin sammuttimen?
Siihen saa varusteeksi megafonin, voi kutsua naapurista poikia hakemaan voita leivälle.
"Walkera ZHUN on palokunnan käyttöön suunniteltu raskas drone. Se pystyy sammuttamaan ulkoiset tulipalot 1.2 - 4.8m pitkällä suuttimella, jolla sammutusaine voidaan paineella suihkuttaa suoraan paloon. Zhun:ssa on myös laukaisulaite palosammuttimille, jolla voidaan laukaista palosammutin palavan tilan sisälle (esim. ikkunan läpi). Sen kantama on jopa 40 m ja tähtäykseen on oma kiikaritähtäinkamera, joka toimii myös pimeällä. Palosammutin laukeaa sisätiloissa ja sammuttaa noin 9m3 kokoisen palon. Kopteri on varustettu LiDAR tutkalla ja esteenväistöantureilla, joilla se voi navigoida ja mitata laukaisuetäisyyden tarkasti haastavassa paloympäristössä. Palosammutin on nopeasti ladattavissa, jolloin useita palopesäkkeitä voidaan sammuttaa nopeasti. Lisäksi kopterissa on normaali ruiskusammutus, jolla voi sammuttaa paloja ulkopuolelta. Lentoaika on 44 000mAh 12s LiHV akulla jopa 45 minuuttia.
Kopteri on varustettu kahdeksalla moottorilla ja se voi toimia vaikka osa moottoreista rikkoontuisi. Kopteri on IP65 vesi- ja pölysuojattu, joten se voi toimia kaikissa sääolosuhteissa. Kopteri on testattu yli 5km korkeudessa, pakkasessa ja lumisateessa. Ensimmäinen drone, jolla on palolaitoksen hyväksyntä (Kiina).
Taittuvarunkoisena se mahtuu pieneen tilaan (esim. henkilöautoon) ja on helppo tuoda palopaikalle ja saatavissa nopeasti lentokuntoon. Sen kantokyky on jopa 15kg ja voi kantaa laajaa varustevalikoimaa tehtävän mukaan. Valikoimiin kuuluu mm. 30 x optinen zoom 4K kamera (vakiona), LiDAR tutka (vakiona), lämpökamera, yökamera, megafoni. Ohjauslaitteen kantama on jopa 10 km."
Tämä se lienee^Hankinnat tästä firmasta todennäköisesti: www.verticalhobby.com
 :
:Walkera Vitus 320 yökuvaus, 3-gimbal, 3D esteenväistö
Kun varusmieheltä lipsahtaa drone 4D-esteenväistöstä huolimatta puuhun niin voi todeta, että meni vituiks.
")
Tai jos häviää niin voi kysellä vastaantulijoilta shit eating grin naamalla missä vitus lennokki?
Komppanian vääpelillä puolestaan joko kasvaa vitutus tai ei ole vitusta puute.
Viimeksi muokattu:
Tuollaista palokuntamallia voisi modattuna käyttää vaikka toimittamaan 10L thermokanisterillinen noppasoppaa pojille etulinjaan
Viimeksi muokattu:
Falangi
Kenraali
Vaikkapa tämmönen.Onkohan Rangereiden tilalle suunnitteilla uudenaikaisempia pitkän lentomatkan omaavia lennokkeja?

Elbit Systems Hermes 45 will Debut at Paris Airshow 2019 - EDR Magazine
Haifa, Israel, June 11, 2019 – Elbit Systems’ Hermes 45 Small Tactical Unmanned Aircraft System (STUAS) will be making its
www.edrmagazine.eu

Kustaanmiekka
Kenraali
Mulle käsivi kyllä. Isrelista ollaan ostettu viime aikoina muutakin hyvää kamaa PV:lleVaikkapa tämmönen.
Elbit Systems Hermes 45 will Debut at Paris Airshow 2019 - EDR Magazine
Haifa, Israel, June 11, 2019 – Elbit Systems’ Hermes 45 Small Tactical Unmanned Aircraft System (STUAS) will be making itswww.edrmagazine.eu
Einomies1
Respected Leader
AIkaisemmin mainittu Milremin THEMIS UGV on saanut aseistukseen lisäpontta nimenomaan ATGM-muodossa:
Lisää Themiksestä:
Veli Virolainen on luonut yllättävän tuotteen ajanmukaisuudessaan ja innovatiivisuudessaaan. Mukaan on saatu MBDA ja FN Herstal. Tuotetta on testattu näemmä ahkerasti ja eri ilmastoissa.
Tuo olisi todella kokeilemisen arvoinen tuote maavoimille. Potilasevakuoinnit helpottuisi, tulituki kk ja ammukset sekä aseistusta kulkisi helposti joukkojen mukana suurempi määrä kuin jalan.
Lisää Themiksestä:
Veli Virolainen on luonut yllättävän tuotteen ajanmukaisuudessaan ja innovatiivisuudessaaan. Mukaan on saatu MBDA ja FN Herstal. Tuotetta on testattu näemmä ahkerasti ja eri ilmastoissa.
Tuo olisi todella kokeilemisen arvoinen tuote maavoimille. Potilasevakuoinnit helpottuisi, tulituki kk ja ammukset sekä aseistusta kulkisi helposti joukkojen mukana suurempi määrä kuin jalan.
Muistanko oikein vai väärin? Ostiko Patria nurkan tuosta Milremistä?AIkaisemmin mainittu Milremin THEMIS UGV on saanut aseistukseen lisäpontta nimenomaan ATGM-muodossa:
Lisää Themiksestä:
Veli Virolainen on luonut yllättävän tuotteen ajanmukaisuudessaan ja innovatiivisuudessaaan. Mukaan on saatu MBDA ja FN Herstal. Tuotetta on testattu näemmä ahkerasti ja eri ilmastoissa.
Tuo olisi todella kokeilemisen arvoinen tuote maavoimille. Potilasevakuoinnit helpottuisi, tulituki kk ja ammukset sekä aseistusta kulkisi helposti joukkojen mukana suurempi määrä kuin jalan.
Einomies1
Respected Leader
Taisi koskea vain sitä huoltoyksikköä. Patriahan on suuntautunut enemmän ylläpitoon. Tuo UGV-yksikkö on erikseen.Muistanko oikein vai väärin? Ostiko Patria nurkan tuosta Milremistä?
https://www.defenseone.com/technolo...erground-and-report-back/157918/?oref=d-riverCustoms and Border Protection uses technology to scan faces, probe vehiclesand keep a watchful eye on the border from the skies above. The agency—with help from Homeland Security’s Science and Technology Directorate—also is looking to send robots into underground tunnels and other places where its sensors can’t communicate.
The Science and Technology Directorate released a request for informationMonday to get a sense of the market for robotic communications technology. Specifically, the agency is looking for off-the-shelf tech that can capture and transmit data—including photos and video—and map hard to reach places.
“DHS S&T is interested in evaluating robotic communication capabilities to characterize underground structures, contents, threats and obstacles along the U.S. southern border,” according to the RFI. “These environments range in size and shape, but are all characterized by lack of GPS-signal, short distance—less than 50 meters—line of sight, and a variety of building materials.”
The agency is looking for solutions that can cover 14 technical areas:
While funding will be provided to advance the technologies, officials are looking for solutions that are past the development stage and ready for field trials.
- Autonomous navigation in known and unknown environments.
- Robot-to-robot communications in close proximity and over larger distance (1 mile).
- Navigation and localization in GPS-absent environments.
- Virtual/augmented reality robot control interfaces.
- Robotic mobility across multiple surfaces.
- Robotic situational assessment—environment characterization, localization, mission intent.
- Mapping, modeling and visualization of the operating environment.
- Near-real time object recognition in video and still images.
- Non-line of sight, low latency, continuous communications in a constrained environment.
- Robotic package delivery and retrieval.
- Command and control communications in GPS-absent environments.
- Human-robot teaming in near proximity (<10 feet).
- Video streaming in intermittent communication conditions.
- Two-way voice, data and video communications in an underground environment with no existing infrastructure.
Yksi kuoli ja 21 loukkaantui Saudi-Arabiassa lentoasemalle tehdyssä lennokki-iskussa
Lennokki-iskun tekijäksi on ilmoittautunut Jemenin huthikapinallisliike.

 www.hs.fi
www.hs.fi
Lennokki-iskun tekijäksi on ilmoittautunut Jemenin huthikapinallisliike.
Yksi kuoli ja 21 loukkaantui Saudi-Arabiassa lentoasemalle tehdyssä lennokki-iskussa
Lennokki-iskun tekijäksi on ilmoittautunut Jemenin huthikapinallisliike.
www.hs.fi
Hunter WOLF Archives - HDT Global
The Hunter WOLF carries heavy loads across difficult terrain. It is a powerful and compact 6X6 skid-steer. It will go where manned vehicles can’t — over narrow trails, steep slopes, and dense jungles. For the military, the Hunter WOLF has proven its ability to accurately fire a wide variety of...
 www.hdtglobal.com
www.hdtglobal.com
https://hackaday.com/2019/06/24/a-better-motor-for-chickenwalkers/The last decade or so has seen remarkable advances in motor technology for robotics and hobby applications. We’re no longer stuck with crappy brushed motors, and now we have fancy (and cheap!) stepper motors, brushless motors for drones, and servo motors. This has led to some incredible achievements; drones are only barely possible with brushed motors, and you can’t build a robot without encoders.
For his entry into the Hackaday Prize, [Gabrael Levine] is taking on one of the hardest robotics challenges around: the bipedal robot. It’s a chickenwalker, or an AT-ST; either way, you need a lot of power in a very small space, and that’s where the OpenTorque Actuator comes in. It’s a quasi-direct-drive motor that was originally pioneered by the MIT Biomimetics Lab.
The key feature of the OpenTorque Actuator is using a big brushless motor, a rotation encoder, and a small, 8:1 planetary gear set. This allows the motor to be backdrivable, capable of force-sensing and open-loop control, and because this actuator is 3D printed, it’s really cheap to produce.
But a motor without a chassis is nothing, and that’s where the Blackbird Bipedal Robot comes in. In keeping with best practices of robotic design, the kinematics are first being tested in simulation, with the mechanical build happening in parallel. That means there’s some great videos of this chickenwalker strutting around (available below), and so far, everything looks great. This bipedal robot can turn, walk, yaw, and work is continuing on the efforts to get this bird-legged bot to stand still.